Introducción
Tarjeta microcontroladora de reducidas dimensiones compatible con los Módulos Y1 / MY1 / REPY1. Las aplicaciones principales son la programación de robots modulares, robots móviles como el Miniskybot (o derivados) o bien para usos educaciones.
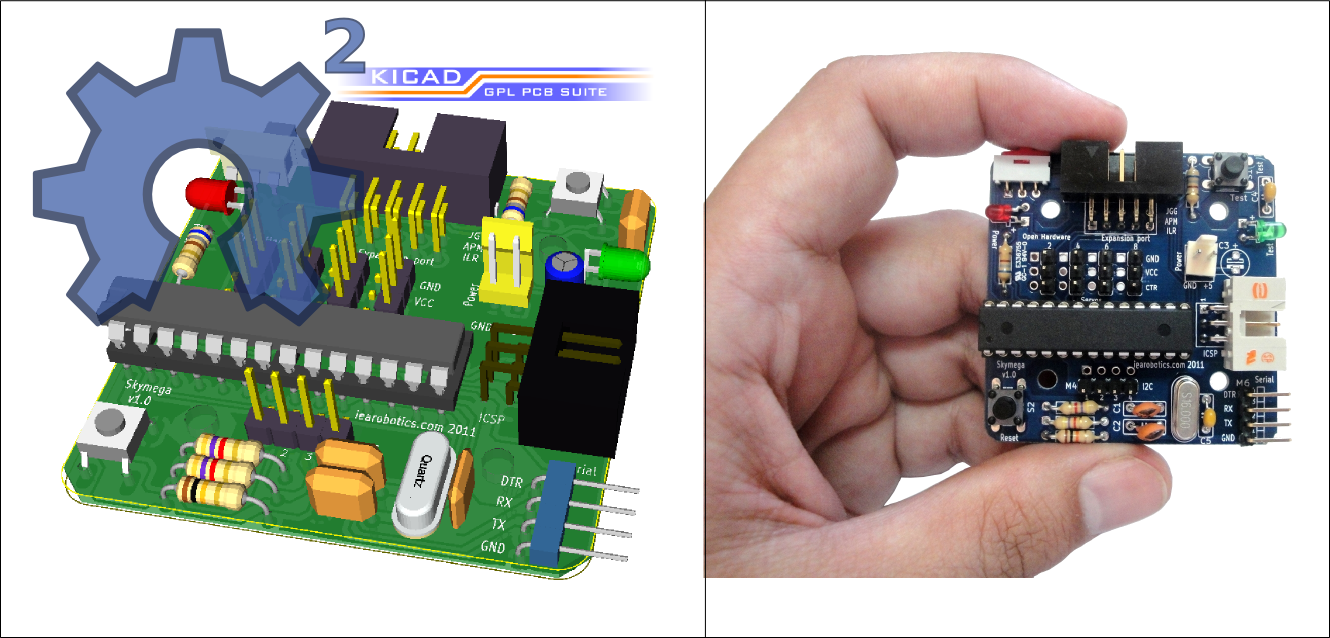
La tarjeta Skymega es hardware libre2. Ha sido diseñado con la herramienta libre Kicad. También es compatible con Arduino.
Características
- Hardware libre2
- Compatible mecánicamente con la tarjeta Skycube
- Compatible con Arduino
- Microprocesador: ATMEGA a 16Mhz. Modelos: 88/168/328
- Conexión de hasta 8 servos (8 módulos).
- Los conectores de los servos se pueden poner por ambas caras de la placa
- Comunicación por bus I2C entre tarjetas skymega
- Hasta 2 conectores de I2C, que se pueden soldar por ambas caras
- Conector de alimentación doble, tipo molex, uno por cada cara
- Conector de grabación ICSP
- Led de pruebas
- Pulsador de pruebas
- Micro-interruptor de on/off
- Led de power-on
- Slot de expansión para conectar sensores
Fotos
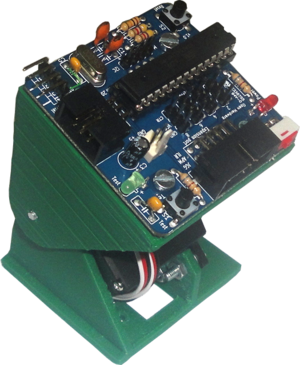 La skymega 1.0 en un módulo Repy1 ( click para ampliar) |
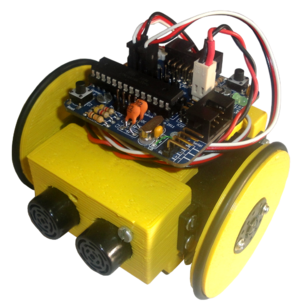 El Miniskybot con una skymega ( click para ampliar) |
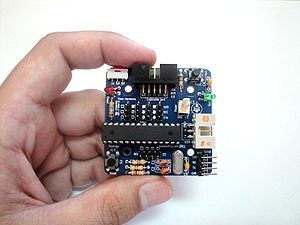 Tarjeta Skymega 1.0. Lote 1 ( click para ampliar) |
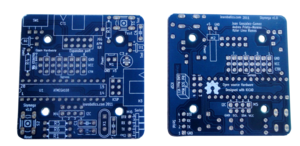 PCB de la Tarjeta Skymega 1.0. Lote 1 ( click para ampliar) |
Conexión al PC
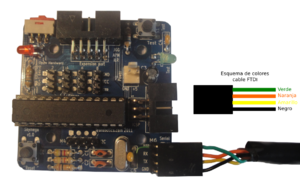
La skymega se conecta al PC a través de un cable USB-serie de FTDI (modelo TTL-232R-5V). Este cable tiene un conector de 6 pines. Para usarlo con la Skymega es necesario modifica este conector y sustituirlo por uno de 4 pines como se muestra en las fotos. Opcionalmente, si no se dispone del conector de 4 pines, se puede reutilizar el de 6, colocando los cables como se indica en las fotos y sin conectar los 2 hilos sobrantes.
Este cable sirve para descargar firmware en la Skymega, así como comunicarse vía puerto serie con ella.
 Conexión del cable FTDI modificado a la Skymega 1.0 para descargar software ( click para ampliar) |
 El cable USB-serie de FTDI: TTL-232R-5V modificado para la skymega ( click para ampliar) |
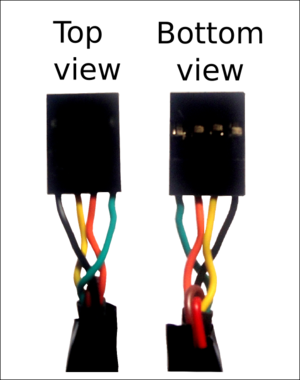 Detalles del conector. Vistas superior e inferior ( click para ampliar) |
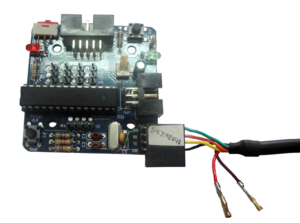 Conexión de la skymega al PC con un cable FTDI de 6 pines modificado, sin sustituirlo por un conector de 4 pines ( click para ampliar) |
Descripción de elementos
Partes
 Parte frontal de la Skymega ( click para ampliar) |
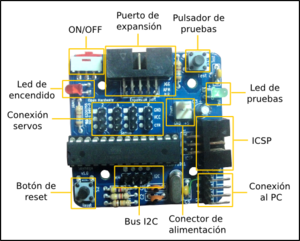 Descripción de la skymega ( click para ampliar) |
Pines
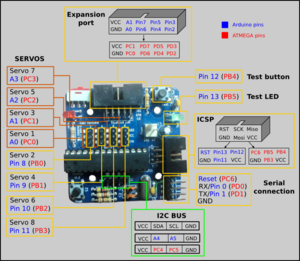 Asignación de pines de la Skymega. Las etiquetas azules son pines correspondientes a la nomenclatura de Arduino y las rojas del micro ATMEGA ( click para ampliar) |
Alimentación
La Skymega se alimenta con un voltaje entre 4.5v y 6v. Es necesario crear un cable con un conector molex de 2 vías para alimentarla. Existen varias posibilidades:
- Utilizar un portapilas, con el conector molex
- Crear un cable USB-molex para alimentarla directamente desde el PC
- Utilizar cualquier fuente de alimentación externa con un conector molex
 Conector molex de alimentación. ¡¡Ojo a la colocación exacta de los cables!! ( click para ampliar) |
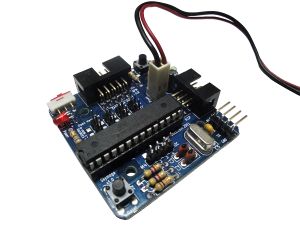 La skymega con el cable de alimentación conectado ( click para ampliar) |
 Portapilas con 4 pilas AAA ( click para ampliar) |
Por hacer: foto del cable de alimentación por USB
|
Por hacer: Foto con fuente de alimentación externa
|
Conexión de servos
| Por hacer: Foto de conexión de los servos
|
Accesorios imprimibles
Periféricos
Grabación del Bootloader
Probando la placa: "Hola mundo"
- Es necesario que el Bootloader esté previamente grabado
- Alimentar la skymega, conectando bien el portapilas o el cable de alimentación USB.
- Encender la placa con el interruptor. El led rojo se encenderá
- Enchufar el cable de descarga (FTDI) al PC y conectarlo a la Skymega
- Ejecutar el entorno de arduino
- Seleccionar la placa en Tools/Board: Arduino Duemilanove or Nano W/ ATmega 328 (Si el micro que se tiene es el ATMEGA168, seleccionar la opción: Arduino diecimila, Duemilanove or Nano W/ ATmega 168)
- Seleccionar el puerto serie en Tools/Serial Port. En Linux típicamente será el /dev/ttyUSB0
- Abrir el ejemplo "hola mundo". Pinchar en File/Examples/1.Basic y seleccionar Blink.
- Descargar en la skymega. Pinchar el icono correspondiente (ver figura) o la opción File/Upload to I/O Board. El programa se compilará y empezará a descargarse. Al cabo de unos segundos se podrá ver cómo el led verde de la skymega se parpadeará.
Ejemplos de programación
Programación Avanzada
Planos
 Utilizar la version 2011-08-04 o superior de KICAD. Utilizar la version 2011-08-04 o superior de KICAD.
|
- Ficheros FUENTE y de fabricación:
- Ficheros con documentación en PDF:
Repositorio
Historia
- 17/Nov/2011: Repartidos 40 PCBs entre los estudiantes de la UC3M para que las monten
- 03/Agosto/2011: Montaje de 50 skymegas finalizado
- 20/Junio/2011: Recibido el primer lote de 100 PCBs. Montadas y probadas 3 prototipos (Blog)
- 29/Mayo/2011: Encargados 100 PCBs en pcbcart. Tardarán unas 3 semanas. Se espera recibirlos la semana del 20 de Junio
- 16/Mayo/2011: Fabricados 8 PCBs prototipos en la ETSI de Telecomunicación (UPM). Montada y probada!! (Blog)
|
|
 Itziar Lima y Juan Gonzalez soldando el PCB de la skymega |
- 07/Mayo/2011: Cambio de nombre. La placa ha sido bautizada como Skymega, en vez de Skycube-mega.
- 14/Abril/2011: Itziar Lima ha hecho un nuevo esquema y ha soldado un prototipo. Está validado
|
|
 Itziar Lima soldando el prototipo |
- 30/Mayo/2010: Construido prototipo I. Probado con la locomoción de Minicube-I (Blog)
|
|
|
|
|
300|250</youtube>
Skycube-mega prototipo 1: Ejemplo de locomoción
del robot Minicube-I
|
- 27/Mayo/2010: Prototipo preliminar. Placa protoboard con un Arduino nano (Blog)
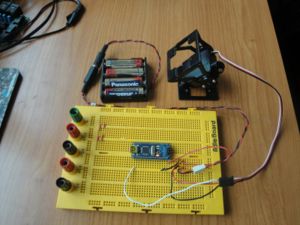 Prototipo I: Arduino nano montado en una protoboard, haciendo oscilar un servo |
300|250</youtube>
Prototipo preliminar: Oscilación de un módulo MY1
|
Autores
Licencia

|
Open Source Hardware Definition v1.0
Hardware de Fuentes Abiertas (OSHW en inglés) es aquel hardware cuyo diseño se hace disponible públicamente para que cualquier persona lo pueda estudiar, modificar, distribuir, materializar y vender, tanto el original como otros objetos basados en ese diseño. Las fuentes del hardware (entendidas como los ficheros fuente) habrán de estar disponibles en un formato apropiado para poder realizar modificaciones sobre ellas.
|
Enlaces
Noticias
- 21/Junio/2011: Añadidas fotos de la versión 1.0
- 29/Mayo/2011: Añadidas fotos del PCB prototipo
- 7/Mayo/2011: Añadido fotos del prototipo de Itziar Lima
- 27/Mayo/2010: Comenzada esta página




























