Introducción
Los módulos REPYZ son las unidades necesarias para construir robots modulares. Están diseñados para ser fabricados con impresoras 3D opensource (Repraps), para que cualquiera pueda disponer de ellos. Son hardware libre: se conceden permisos para su fabricación, estudio, modificación, copia y distribución. Son una evolución de los Módulos REPY, tanto de la versión 1, como de los REPY V2 (de David Estévez)
Las nuevas características de estos módulos son:
- Estructura simplificada. El cuerpo del módulo es mucho más pequeño que su antecesor, gracias a la utilización de la tapa imprimible del servo. Tarda menos en imprimirse y es más fácil de montar
- Robustez mejorada. Las piezas están reforzadas y el diseño es mucho más robusto
- Compacto. Gracias a la inclusión de un falso eje en la tapa inferior del servo, el diseño es mucho más compacto
- Simetría. Esta versión hereda la simetría de la versión v2, de manera que los robots así creados se mueven igual tanto boca arriba como boca abajo
- Versión PRO. Además de la versión estándar, hay una PRO que utiliza rodamientos 608 para el falso eje, haciendo que los movimientos sean más suaves y eliminando las holguras.
Información
| Dimensiones |
80.5mm x 52.5mm x 52.5mm (en posición de reposo)
|
| Material |
ABS ó PLA (o cualquiera otro que se pueda usar con las repraps)
|
| Peso |
Módulo montado con servo y tornillos: Versión estándar: 75gr. Versión PRO: 85gr
|
| Tiempo de impresión |
2h aproximadamente
|
| Tiempo de montaje |
10 minutos
|
Repositorio
Descargar
Piezas para imprimir (STL)
Fuentes
Fotos
 Módulo repyz en posición horizontal ( click para ampliar) |
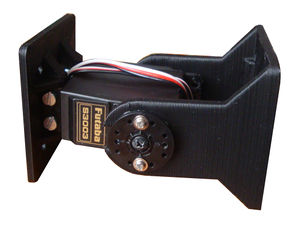 Módulo repyz en posición horizontal (ángulo contrario) ( click para ampliar) |
 Las tres partes impresas del módulo ( click para ampliar) |
|
|
|
|
Vídeos
Planos del módulo
REPYZ normal
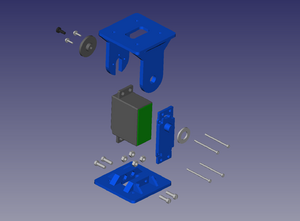 Despiece del módulo REPYZ ( Click para aumentar) |
REPYZ PRO
La versión PRO se diferencia de la normal en que lleva un rodamiento 608 en el falso eje. El resto de piezas son iguales.
Montaje
Material necesario

Todo el material necesario para montar un módulo REPYZ PRO (
click para ampliar)
En la siguiente lista (y en la figura) se muestra el material necesario para construir un módulo REPYZ PRO. Para monta la versión normal (no PRO), no es necesario el rodamiento 608. La cabeza del módulo también es diferente (hay que imprimir otro fichero STL).
| Las 3 piezas imprimibles del módulo
|
| 1 servos de tipo Futaba 3003 o compatible
|
| 1 Arandela M8
|
| 1 Rodamiento 608 (Sólo para versión PRO)
|
| 4 tuercas M3
|
| 4 tornillos M3x10mm
|
| 2 tornillos M2x12 mm (vienen con el servo)
|
Instrucciones de montaje
- Paso 1: Repasar los taladros M3 del cuerpo del módulo y de la tapa inferior del servo para asegurarse que los tornillos M3 entran bien. Se pueden repasar introduciendo un destornillar de estrella de 3mm o bien con una lima pequeña.
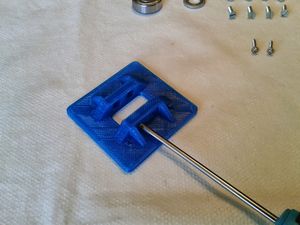 Fig. 1-1: Repasando los taladros del cuerpo del módulo, con un destornillador de estrella de 3mm de diámetro ( click para ampliar) |
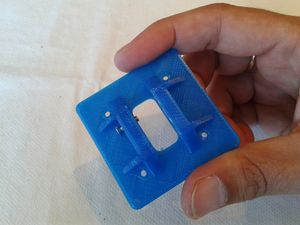 Fig. 1-2: Comprobando que los tornillos M3 entran bien ( click para ampliar) |
 Fig. 1-3: Comprobando que los tornillos M3 entran bien en la tapa inferior del servo. Agrandarlos en caso necesario ( click para ampliar) |
- Paso 2: Empotrar las 4 tuercas M3 en el cuerpo del módulo. Dependiendo de la impresora donde se haya impreso el módulo, las tuercas entrarán bien aplicando una ligera presión, o bien no encajarán en el hueco. En ese caso basta con aplicar un poco de calor con el soldador y empujar la tuerca hasta que quede perfectamente incrustada.
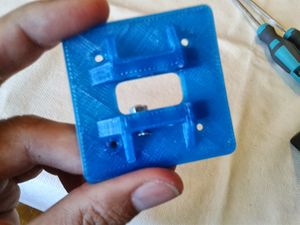 Fig. 2-1: Introducir un tornillo M3 con su tuerca, todavía sin meter en el hueco ( click para ampliar) |
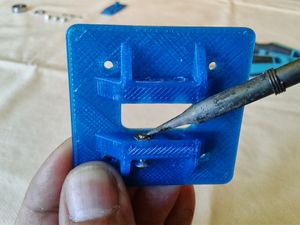 Fig. 2-2: Aplicar calor con un soldador y empujar suavemente hasta que la tuerca se incruste en su hueco ( click para ampliar) |
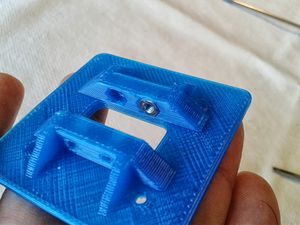 Fig. 2-3: Una tuerca empotrada ( click para ampliar) |
 Fig. 2-4: Todas las tuercas empotradas (en la imagen sólo se ven 2 de las 4) ( click para ampliar) |
- Paso 3: Colocar la nueva tapa inferior del servo. Desatornillar la tapa inferior del servo Futaba 3003 y colocar la nueva tapa (impresa)
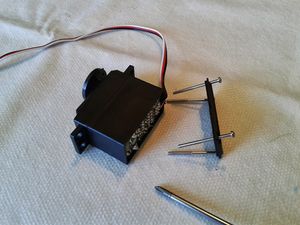 Fig. 3-1: Desatornillar la tapa inferior del Futaba 3003 ( click para ampliar) |
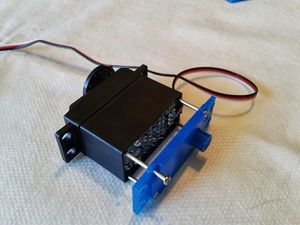 Fig. 3-2: Atornillar la nueva tapa ( click para ampliar) |
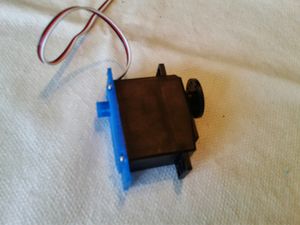 Fig. 3-3: Servo con la nueva tapa colocada ( click para ampliar) |
- Paso 4: Atornillar el servo al cuerpo. Primero colocar el servo en el cuerpo. Como el cuerpo es simétrico, da igual hacia qué lado apunte el eje del servo. Hay que apretar el servo para encajarlo en el cuerpo. En caso de que no entrase bien, limar un poco los laterales de la pestaña de la tapa inferior
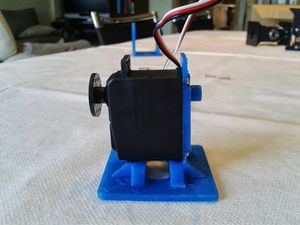 Fig. 4-1: Colocar el servo sobre el cuerpo ( click para ampliar) |
 Fig. 4-2: Servo sobre el cuerpo. Otra vista ( click para ampliar) |
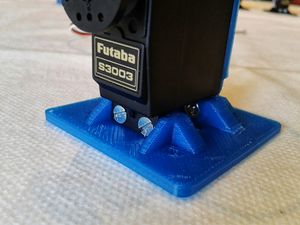 Fig. 4-3: Colocar los 4 tornillos. En la imagen se muestran los 2 frontales ( click para ampliar) |
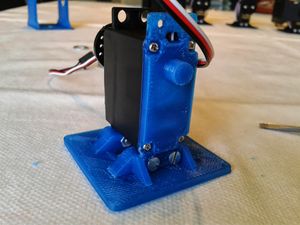 Fig. 4-4: Servo atornillado al cuerpo. Vista posterior ( click para ampliar) |
- Paso 5: Atornillar la corona del servo a la cabeza del módulo. Primero se colocan los tornillos M2 en la corona del servo, de forma que las puntas sobresalgan un poco. Esto permitirá que los tornillos sirvan de guía al colocar la corona en la cabeza del módulo. A continuación se atornillan hasta el fondo. Por último hay que cortarlos para que no choquen contra el servo cuando se coloque la cabeza en el módulo.
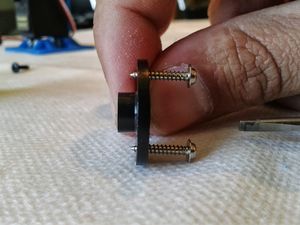 Fig. 5-1: Los tornillos M2 en la corona del servo. Vista lateral ( click para ampliar) |
 Fig. 5-2: Los tornillos M2 en la corona del servo. Vista frontal ( click para ampliar) |
 Fig. 5-3: Colocar la corona sobre la cabeza, haciendo coincidir los tornillos con los taladros ( click para ampliar) |
 Fig. 5-4: Atornillar la corona a la cabeza ( click para ampliar) |
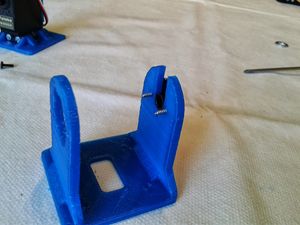 Fig. 5-5: Los tornillos M2 sobresalen por la parte posterior ( click para ampliar) |
 Fig. 5-6: Cortando el sobrante de los tornillos ( click para ampliar) |
 Fig. 5-7: Tornillos cortados ( click para ampliar) |
|
- Paso 6: Preparar los huecos para el rodamiento. Hay que comprobar que el rodamiento entra bien en el falso (suavemente). Si no es así, limar un poco el falso eje. También hay que comprobar que entra bien en el hueco de la cabeza del módulo. Limar si es necesario.
 Fig. 6-1: Comprobando que el rodamiento entra bien en el falso eje ( click para ampliar) |
 Fig. 6-2: Comprobando que el rodamiento entra bien en la cabeza del módulo ( click para ampliar) |
- Paso 7: Unir el cuerpo y la cabeza del módulo. Esta unión se tiene que hacer situando el eje del servo en una posición CONOCIDA. Para ello habrá que rotarlo hasta un extremo (o bien conectarlo a la electrónica y posicionarlo en el centro).
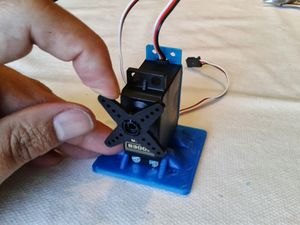 Fig. 7-1: Rotar el eje del servo en sentido antihorario hasta llevarlo al extremo. Para facilitar el giro, se puede usar la corona de 4 brazos que viene con el servo ( click para ampliar) |
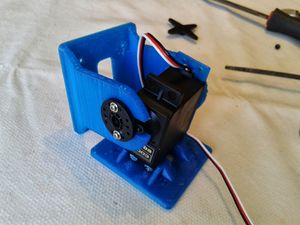 Fig. 7-2: Poner la cabeza en la posición indicada ( click para ampliar) |
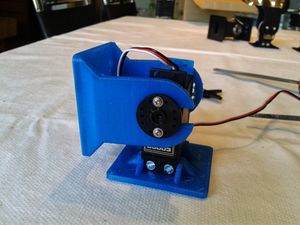 Fig. 7-3: Enganchar la corona del servo en el eje, de manera que en esa posición la cabeza FORME 90 GRADOS (aproximadamente) con el servo ( click para ampliar) |
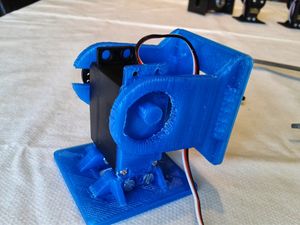 Fig. 7-4: Vista posterior ( click para ampliar) |
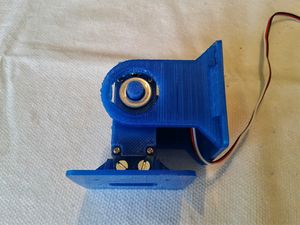 Fig. 7-5: Colocar la arandela M8 sobre el falso eje ( click para ampliar) |
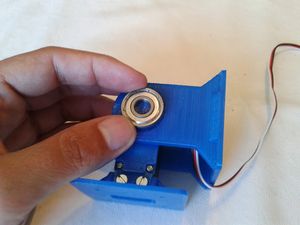 Fig. 7-6: Insertar el rodamiento en el falso eje y en el hueco de la cabeza del módulo ( click para ampliar) |
 Fig. 7-7: Vista superior. Así debe quedar el módulo una vez conectados cabeza y cuerpo ( click para ampliar) |
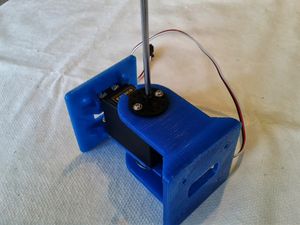 Fig. 7-8: Atornillar la corona al servo ( click para ampliar) |
- Paso 8: Módulo Listo! Últimas comprobaciones. Colocar el módulo en ambos extremos y compararlo con las imágenes
 Fig. 8-1: Módulo en el extremo izquierdo (movimiento anti-horario). Debe quedar más o menos a 90 grados ( click para ampliar) |
 Fig. 8-2: Módulo en el extremo derecho (movimiento horario). El ángulo será mayor de 90 grados ( click para ampliar) |
Autor
Juan González Gómez
Licencia
Créditos
- David Estévez, es el autor de los módulos REPY v2. Esta versión de los módulos ha sido una gran fuente de inspiración. ¡Gracias!
- Andrés Prieto-Moreno. Suya es la idea de hacer una tapa inferior del servo que incluya las mismas orejas con taladros de la parte superior. De esta forma el servo es simétrico y se puede conectar más fácilmente a otras estructuras. Andrés también es el creador de los módulos MY, de los que he tomado ideas para los REPYZ. ¡Muchas gracias!
- Gocha es el gato de Carlos García Saura, que ha prestado su imagen para el logo de los módulos repyz. ¡Graciazzzz! :-)
Noticias
- 5/Junio/2013: Publicados los módulos en:
- 4/Junio/2013: Publicadas las instrucciones de montaje
- 31/Mayo/2013: Publicados los planos de los módulos en Freecad
- 19/Mayo/2013:
- Primer prototipo de los módulos listo
- Primera configuración mínima PP con los módulos REPYZ
- Comenzada esta página

















































{kind=link}