| Artículo 2: Alternativas Hardware para la Locomoción de un Robot Ápodo |
| Disponible on-line: [PDF] [HTML] |
| Transparencias de la presentación: [PDF] [OpenOffice] |
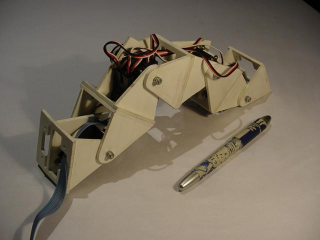
| Información sobre el robot ápodo Cube Reload: Todos los planos, software y documentación aquí |
Se condecen permisos para usar, modificar y/o distribuir este artículo, siempre que se mantenga esta nota.
| Documentos para descargar |
| 51-Gonzalez_et_al.pdf (122 KB) | Artículo en formato PDF |
| cube-jcra.tgz (925 KB) | Fuentes del artículo para Lyx |
| cube-jcra-pres.pdf (308 KB) | Presentación en formato PDF |
| cube-jcra-pres.sxi (703 KB) | Presentación en OpenOffice |
| Otros |
| alt-II.tgz (7KB) | Ficheros fuentes, en VHDL, de la alternativa II |
| alt-I.tgz (27KB) | Ficheros fuentes, en VHDL, de la alternativa I |