Next: 4 Implementación en procesadores Up: 3 Algoritmo de locomoción Previous: 1 Cálculo del vector
![]()
![]()
![]()
Next: 4
Implementación en procesadores Up: 3
Algoritmo de locomoción Previous: 1
Cálculo del vector
Para generar la tabla de control de movimiento,
son necesarios el periodo
![]() de la onda y el parámetro
de la onda y el parámetro
![]() .
Se toma una muestra de la onda cada
.
Se toma una muestra de la onda cada
![]() unidades de tiempo, en los instantes
unidades de tiempo, en los instantes
![]() ,
,
![]() ,
,
![]() ,
...,
,
...,
![]() .
.
La figura 4 muestra un
ejemplo de los pasos necesarios para obtener las dos primeras filas
de la tabla:
![]() y
y
![]() ,
aplicado a un robot de seis articulaciones. Comenzando con el robot
situado sobre el eje x y una onda sinusoidal en el instante
,
aplicado a un robot de seis articulaciones. Comenzando con el robot
situado sobre el eje x y una onda sinusoidal en el instante
![]() ,
el vector
,
el vector
![]() se calcula ``ajustando el robot a la onda'', como se explicó
en el apartado 3.1.
Después se incrementa el tiempo obteniéndose una nueva
onda desplazada y finalmente se ajusta el robot a esta nueva onda,
obteniéndose
se calcula ``ajustando el robot a la onda'', como se explicó
en el apartado 3.1.
Después se incrementa el tiempo obteniéndose una nueva
onda desplazada y finalmente se ajusta el robot a esta nueva onda,
obteniéndose
![]() .
Repitiendo sucesivamente los pasos 1 y 2, se obtienen los
.
Repitiendo sucesivamente los pasos 1 y 2, se obtienen los
![]() vectores de posición angular que componen la tabla.
vectores de posición angular que componen la tabla.
|
|
Figure 4: Ejemplo del algoritmo usado para generar las tablas de control. Se calculan las dos primeras filas de la tabla.
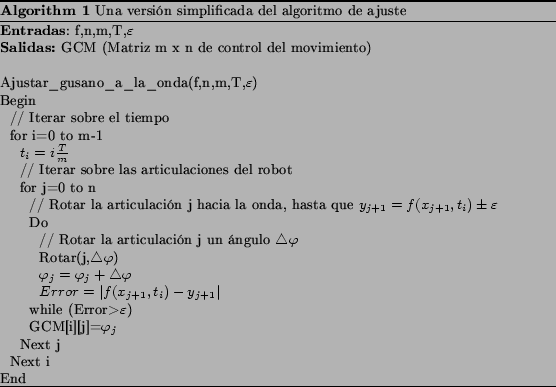
El pseudo código se muestra en el algoritmo 1. Los parámetros de entrada son:
![]() :
Ecuación de la onda
:
Ecuación de la onda
![]() : Número total de articulaciones
: Número total de articulaciones
![]() :
Número de muestras temporales
:
Número de muestras temporales
![]() :
Periodo de la onda
:
Periodo de la onda
![]() :
Máximo error permitido en la aproximación
:
Máximo error permitido en la aproximación
La salida es la matriz
![]() x
x![]() de control del movimiento. El algoritmo se puede emplear para
cualquier tipo de onda, sin embargo, para las pruebas de
locomoción se han empleado ondas sinusoidales.
de control del movimiento. El algoritmo se puede emplear para
cualquier tipo de onda, sin embargo, para las pruebas de
locomoción se han empleado ondas sinusoidales.
![]()
![]()
![]()
Next: 4
Implementación en procesadores Up: 3
Algoritmo de locomoción Previous: 1
Cálculo del vector
![\includegraphics[%scale=0.5]{ps/ajuste2.eps}](img34.png)