
|
”Motion of Minimal Configurations of a Modular Robot: Sinusoidal, Lateral Rolling and Lateral Shift”. Clawar. Londes. Septiembre 2005. |
En la foto de la izquierda está el robot Lauron-IV, del FZI Karlsruhe, al que le habían puesto una cámara omnidireccional que permite ver a un operador el entorno, utilizando unas gafas de realidad virtual. No pudimos por menos de probar el sistema y sumergirnos en él :-) (Foto de la derecha).
|
|
|
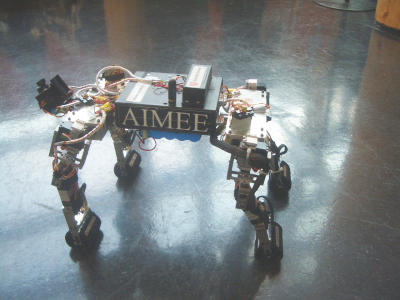
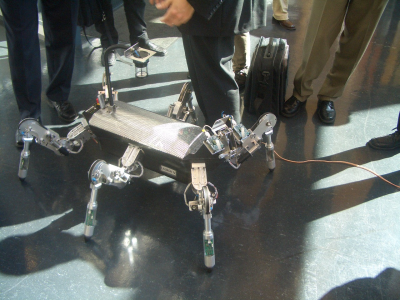
Otro robot impresionante era Aimee (foto de la izquierda). Un robot cuadrúpedo, desarrollado por estudiantes, en el laboratorio de robótica de la Universidad de Bremen. Este robot, además es capaz de “trepar” por una superficie inclinada (foto de la derecha). Martin Albercht y su compañero nos hicieron una demostración del robot.
|
|
|
El primer día del congreso fue muy intenso. Terminamos sobre las 17h y llegamos al hotel reventados. Sólo tuvimos tiempo para salir un rato, tomarnos un Kebab en un sitio cercano al hotel y rematar la faena tomando una cerveza en el Black Lion ;-)
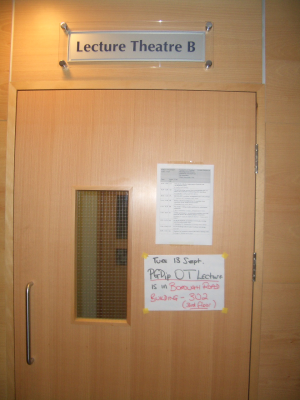
...Y llego el Miércoles. Y con él mi ponencia... Iban a ser 20 minutos horribles, pero luego me podría relajar y disfrutar del congreso. Me tocó en el “Lecture theatre B” (Foto de la izquierda). Pasé un rato fatal... y lo peor fueron las preguntas. No tenía ni idea de lo que me estaban preguntando y tampoco sabía cómo responder... en fin... mi Inglés es malísimo :-(
|
|
|
Mi charla pasó... ¡Ya estaba de vacaciones!!. Ahora tocaba disfrutar del congreso!!.
Otro de los asistentes fue Enric Celaya del IRI (Instituto de Robótica e Informática). En la izquierda estamos Alejandro y yo con él y en la derecha, Alejandro le está enseñando a Melanie III.
|
|
|